
Help me Compete in an International Robot Competition

My Travel Story
The competition is called "Robots Intellect". The goal of the competition is to have a robot autonomously get to an area, find an object and bring it back to the starting point.
Further information can be found at the following link (sometimes their server is down, so if the link doesn't work please try again later):
http://www.robotsintellect.com/en/main/
We have a working prototype from last semester which can be seen driving in the video. This semester will be used to get the robot running on an outdoor track, getting it to recognize and pick up the object.
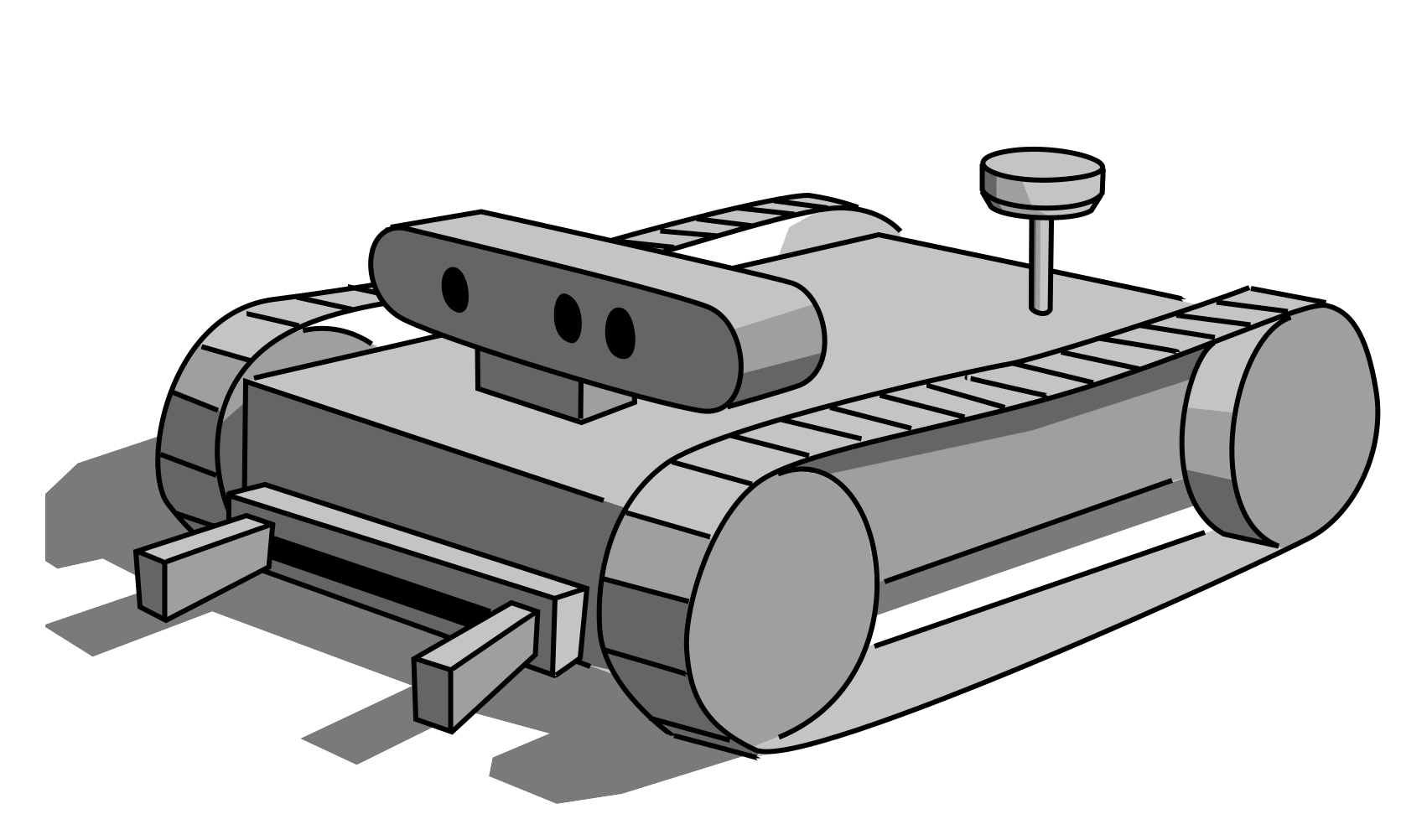
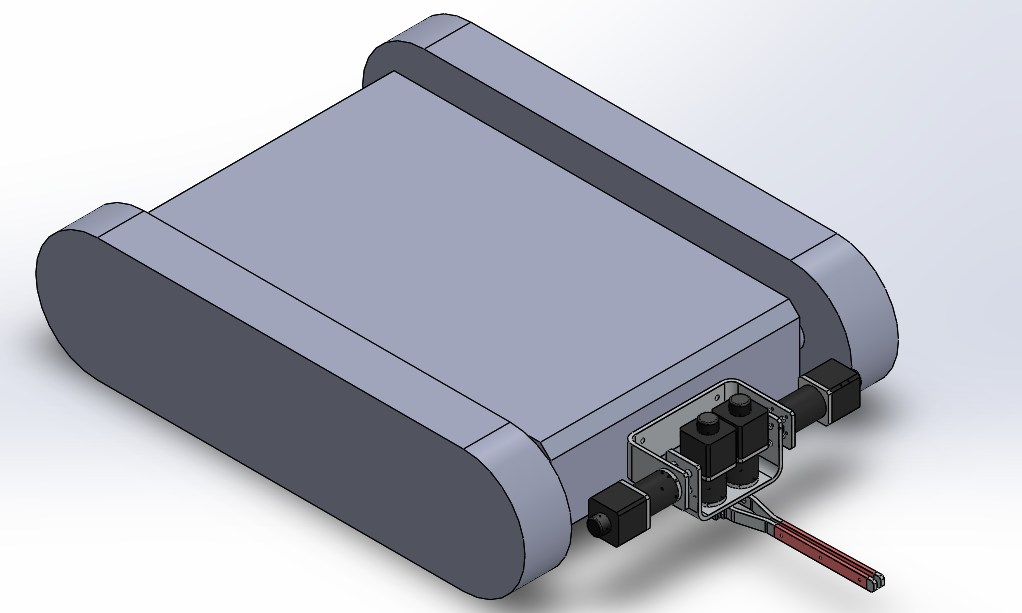
We have ordered the robot hardware and a currently waiting for it to arrive. Meanwhile, we're working on producing a gripper for the robot and getting reliable GPS data. The design of the robot and the gripper can be seen in the two pictures.
The money will be used to fund the shipping of the robot and our travel to the competition. Local travel in Lithuania has already been taken care of.
Updates
3-
Vicky Almost Assembled
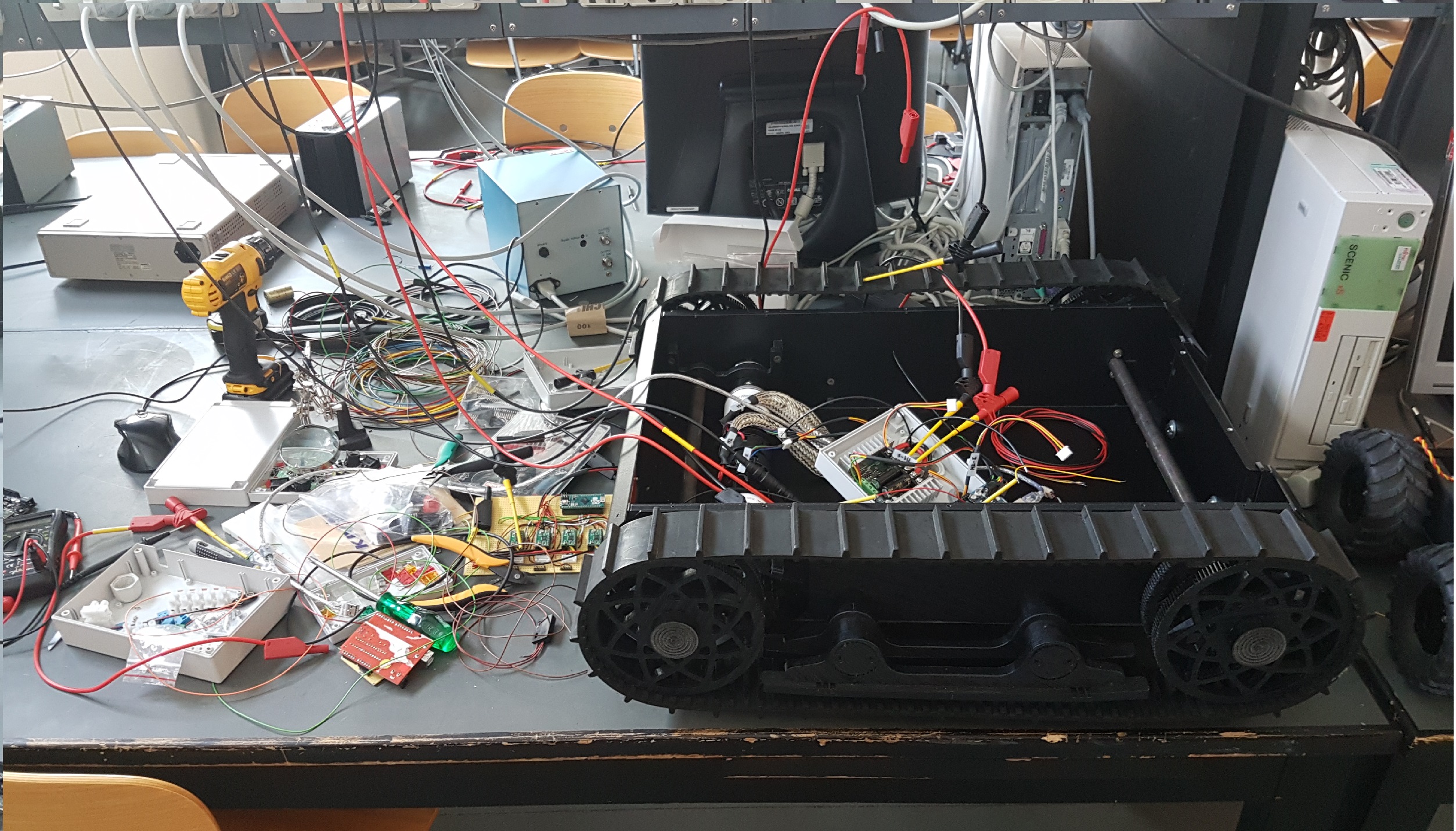
Three weeks have passed since we received all the parts for Vicky and a lot of assembly work was done. First, the emergency stop had to be included into the system. Second, the motor controller was mounted and the cooler for possible overheating was mounted as well. High circuitry wiring has been put in place and relays to control the battery power flow. Lastly, the fuse box was wired to avoid short circuit. ?>
As most of the assembly is done, more focus has been put on the control programming as well as adjusting EKF parameters for localization. In the video below you can see a short summary of the assembly presented by our lead technician Vojtech Vesely.
https://youtu.be/Oi3X6hcfe7E -
We Got Our Gripper Parts

Since the last update we've gotten most of the parts for our gripper. We're only missing a few assembly parts, which should be done early next. ?>
We also decided to dismount the shelves from a TurtleBot and we're going to mount it onto the Jaguar to provide a structure to mount the sensors onto.
The GPS is now functional although we're still missing the wireless connector.
Now the focus is to get the Stereo Camera to be able to recognize objects to be used for the mapping. We're also working on navigation and guidance by GPS.
-
Campaign Ended
kr 2,950
Total Donation Received-
28%
Funded -
kr 10,500
Goal Amount -
0
Days Left
-
-
Cost Calculator
-
Airfare/ International Flights
kr 5,500
-
Accommodation
kr 4,000
-
Local Travel Expenses
kr 500
-
FundMyTravel Site Fee
kr 500
-
-
Donor Rewards
-
50 DKK
We will write you in acknowledgements of our report.
-
100 DKK
We'll make a logo livery for the robot with your profile picture or a picture of your choice. No inappropriate pictures.
-
500 DKK
A personalized video from us with our heartfelt thanks. (Will be in English)
-
-
Funders
-
Jesper F. Hansen Funded kr 100 DKK
Apr 07, 2017 -
Vojtech Vesely Funded kr 1,200 DKK
Mar 19, 2017 -
Ghita Aunstrup Funded kr 100 DKK
Mar 04, 2017 -
Rasmus nissen eilertsen Funded kr 250 DKK
Feb 25, 2017 -
Ute H. Madsen Funded kr 500 DKK
Feb 23, 2017 -
Hanne McDonald Funded kr 500 DKK
Feb 22, 2017 -
Nikolaj Eriksen Funded kr 300 DKK
Feb 22, 2017
-